地址空间
进程空间和内核空间怎么划分
以32为系统为例
- 进程地址空间占用3G, 每个进程都是3G
- 内核空间占用1G 所有进程共用
graph TD A["进程A空间3G"] B["进程B空间3G"] C["内核空间1G"] A-->C B-->C
所以, 进程A和进程B空间上会有重叠
地址怎么分配的呢?
以32位系统为例, linux下:
- 用户进程地址范围是: 从
0x00000000到0xbfffffff - 内核进程地址范围是: 从
0xc0000000到0xffffffff
进程页表与地址映射
页表和地址映射
每个进程都有一套页表,负责将虚拟地址映射到物理地址。这套页表也分为两部分:
- 用户页表:负责将用户空间的虚拟地址映射到物理内存。这部分是进程独有的。
- 内核页表:负责将内核空间的虚拟地址映射到物理内存。这部分是所有进程都相同的。
每个进程页表中都有 内核空间的完整映射
当一个进程创建时,内核会为它创建一个新的页表,但会直接复制或共享内核空间的映射部分。这意味着,不管哪个用户进程在运行,它的页表都包含了对内核空间的所有正确映射。
进程只能访问有效内存区域
- 每个内存区域也具有相关权限如对相关进程有可 读、可写、可执行属性。
- 如果一个进程访问了不在有效范围中的内存区域,或以不正确的方式访 问了有效地址,那么内核就会终止该进程,并返回“段错误”信息。
进程内存区域 详细划分什么样的?
| 段名 (Segment) | 属性 (Permissions) | 作用或说明 (Purpose) | /proc/ |
|---|---|---|---|
| 代码段 (Text) | 只读,可执行 | 存放程序的可执行机器指令。多个进程可以共享同一个可执行文件的代码段,以节省内存。 | [path to executable] (例如 /usr/bin/bash) |
| 数据段 (Data) | 读写 | 存放已初始化的全局变量和静态变量。这部分内容在程序启动时从可执行文件中加载。 | [path to executable] |
| BSS 段 | 读写 | 存放未初始化的全局变量和静态变量。操作系统在程序加载时会将其自动清零。 | [path to executable] |
| 堆 (Heap) | 读写 | 用于动态内存分配的区域,由程序员通过 malloc() 或 new 等函数管理。堆通常从数据段向上增长。 | [heap] |
| 栈 (Stack) | 读写 | 存放函数内的局部变量、函数参数和返回地址。栈由编译器自动管理,从高地址向低地址增长。 | [stack] |
| 共享库 (Shared Libraries) | 读写,可执行 | 存放动态链接库(如 libc.so.6)的代码和数据。内核将常用的共享库映射到多个进程的地址空间以节省内存。 | [path to shared library] (例如 /lib/x86_64-linux-gnu/libc.so.6) |
| 内存映射文件 (Memory-mapped Files) | 可变 | 通过 mmap() 系统调用,将磁盘上的文件直接映射到进程的地址空间,用于高效文件I/O或进程间通信 (IPC)。 | [path to mapped file] |
| 匿名映射 (Anonymous Mapping) | 读写 | 不与任何文件关联的内存映射。通常用于 malloc() 分配大块内存。 | [anon] 或其他无文件名标记 |
| 命令行参数 & 环境变量 | 读写 | 存放程序启动时传递的命令行参数(argv)和环境变量(envp)。 | [stack] 或 [vvar]、[vdso] 等特殊映射,具体取决于系统 |
内存描述符
用内存描述符表示进程地址空间
定义在mm_types.h中
重点成员
| 重点 | 成员变量 (Member) | 类型 | 作用或说明 (Purpose) |
|---|---|---|---|
mm_users | 引用计数 | 记录实际使用该地址空间的进程或线程数量。当多线程共享同一个地址空间时,它的值会大于1。 | |
mm_count | 引用计数 | mm_struct 的主引用计数。只有当mm_users 降为0时,它才会降为0,最终决定 mm_struct 是否被释放。 | |
| 🌟 | mmap | vm_area_struct 链表 | 以双向链表形式组织所有的内存区域 (vm_area_struct)。它便于遍历进程的所有内存区域。 |
| 🌟 | mm_rb | vm_area_struct 红黑树 | 以红黑树形式组织所有的内存区域 (vm_area_struct)。它便于高效地查找某个特定地址所在的内存区域。 |
mmlist | mm_struct 双向链表 | 将所有的 mm_struct 结构体连接成一个全局链表。它的首元素是 init_mm。 | |
mmlist_lock | 锁 | 用于保护全局 mmlist 链表,防止在并发访问时出现数据不一致。 |
进程和线程在内存分配差异
是否共享地址空间几乎是进程和Linux 中所谓的线程 间本质上的唯一区别。
进程和线程通过CLONE_VM表示区分
如果父进程希望和其子进程共享地址空间,可以在调用 clone()时,设置 CLONE_VM 标志。 我们把这样的进程称作线程。
简单来说: 使用这个标志, 会让fork的时候, 原本要拷贝新内存的操作, 变成了指向父亲内存空间的操作
当 CLONE_VM 被指定后,内核就不再需要调用 allocate_mm()函数了,而仅仅需要在调用 copy_mm() 函数中将 mm 域指向其父进程的内存描述符就可以了.
对应的代码
static int copy_mm(unsigned long clone_flags, struct task_struct *tsk)
{
struct mm_struct *mm, *oldmm;
...
...
if (clone_flags & CLONE_VM) {
mmget(oldmm); //增加内存描述符的引用计数
mm = oldmm;
goto good_mm;
}
retval = -ENOMEM;
mm = dup_mm(tsk, current->mm); //如果没有CLONE_VM标志,会执行dup_mm()复制整个内存空间
if (!mm)
goto fail_nomem;
good_mm:
tsk->mm = mm; //最终将内存描述符赋值给新任务
tsk->active_mm = mm; //最终将内存描述符赋值给新任务
return 0;
...
}应用场景
- 线程创建:使用CLONE_VM,多个线程共享同一内存空间
- 进程创建:不使用CLONE_VM,创建独立的内存空间副本(写时复制)
关于内核线程
task_struct 结构表示一个进程, mm指向这个进程的虚拟地址空间也就是mm_struct
但是内核线程mm是空的
为什么要让内核线程的mm是NULL?
一句话: 减少了内存开销和地址空间切换的性能开销,使得内核线程的运行更加轻量和快速
- 无需维护:为了避免内核线程为内存描述符和页表浪费内存
- 无需地址空间切换:在普通进程和内核线程之间进行调度时,如果内核线程有自己的地址空间,那么每次切换都需要更新处理器的页表基地址寄存器(如x86上的CR3),这会带来显著的性能开销(因为TLB缓存需要刷新)。而借用前一个进程的地址空间,则可以避免这种昂贵的地址空间切换。
那内核线程用什么地址空间句柄
一句话: 内核空间使用 前一个线程的 内存地址描述符
具体怎么做的?
- 内核更新内核线程对应的进程描述符中的 active_mm 域,使其指向前一个进程的内 存描述符
进程地址 内存区域划分
细化进程内存内部区域划分
采用面向对象的思想. 使用一种结构体来涵盖所有类型的内存区域, 使用的结构体就是vm_area_struct
内存划分通用结构体:vm_area_struct
成员
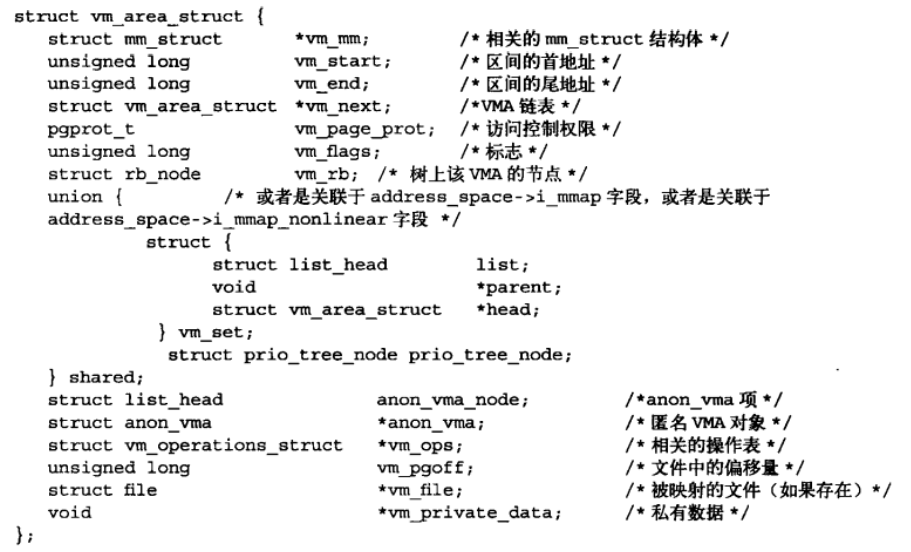
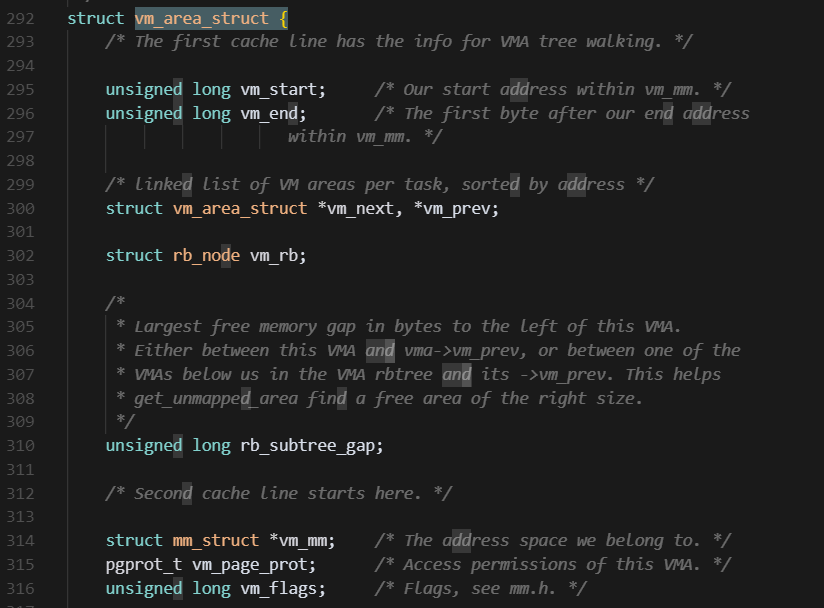
vm_start是内存区间的开始地址(它本身在区间内),而vm_end是内存区间的结束地址(它本身在区间外) 内存区域的位置就在[vm_start, vm_end]- 一个
mm_struct可以包含多个vm_area_struct。 vm_area_struct的归属关系是独一无二的:一个VMA只能属于一个mm_struct。
重点字段 vm_flag vm标志
一个 VMA 的类型告诉我们它代表什么,而这些标志则告诉内核它应该如何被管理和对待。一个 VMA 的类型通常由它创建的方式决定:
VMA 类型与标志的关系
这些标志的存在是为了让 VMA 的行为更加灵活和精细,以适应各种复杂的应用场景。 我们可以通过一个表格来理解这种关系:
| VMA 类型 | 访问权限标志 | 行为标志 | 举例 |
|---|---|---|---|
| 代码段 | VM_READ、VM_EXEC | 无VM_WRITE,可能VM_SHARED | 多个进程共享 /bin/bash 的代码 |
| 数据段 | VM_READ、VM_WRITE | 无VM_EXEC,可能VM_SHARED | 共享库的全局变量 |
| 堆 | VM_READ、VM_WRITE | 无VM_EXEC | 动态分配的内存,如 malloc |
| 栈 | VM_READ、VM_WRITE | 无VM_EXEC | 每个线程独立的栈空间 |
| 文件映射 | VM_READ、VM_WRITE | VM_SHARED 或私有 | 两个进程通过 mmap 共享文件数据 |
| 设备I/O映射 | VM_READ、VM_WRITE | VM_IO、VM_RESERVED | 设备驱动程序映射硬件寄存器 |
VM_SEQ_READ/VM_RAND_READ
- 场景 1:你正在用
mmap系统调用来映射一个大日志文件,并打算从头到尾读取它。这时,你可以通过madvise()设置VM_SEQ_READ标志,让内核进行高效的预读。 - 场景 2:你正在用
mmap映射一个数据库文件,但应用程序的访问模式是随机查询,跳跃式地访问文件中的数据。这时,你可以设置VM_RAND_READ标志,告诉内核关闭预读,避免不必要的性能开销
在用户层面,可以通过madvise函数来控制
#include <stdio.h>
#include <stdlib.h>
#include <sys/mman.h>
#include <sys/stat.h>
#include <fcntl.h>
int main() {
int fd;
struct stat st;
void *addr;
fd = open("large_file.dat", O_RDONLY);
if (fd == -1) { /* error handling */ }
fstat(fd, &st);
addr = mmap(NULL, st.st_size, PROT_READ, MAP_SHARED, fd, 0);
if (addr == MAP_FAILED) { /* error handling */ }
// 告诉内核:我将按顺序访问这段内存
if (madvise(addr, st.st_size, MADV_SEQUENTIAL) == -1) { /* error handling */ }
// ... 现在开始顺序读取数据 ...
munmap(addr, st.st_size);
close(fd);
return 0;
}#include <sys/mman.h>
// ... (其他头文件和代码同上)
int main() {
// ... (mmap 部分同上)
// 告诉内核:我将随机访问这段内存
if (madvise(addr, st.st_size, MADV_RANDOM) == -1) { /* error handling */ }
// ... 现在开始随机读取数据 ...
munmap(addr, st.st_size);
close(fd);
return 0;
}重点字段vm_ops vm操作
代码位置
struct vm_operations_struct {
void (*open)(struct vm_area_struct * area);
void (*close)(struct vm_area_struct * area);
int (*split)(struct vm_area_struct * area, unsigned long addr);
int (*mremap)(struct vm_area_struct * area);
vm_fault_t (*fault)(struct vm_fault *vmf);
vm_fault_t (*huge_fault)(struct vm_fault *vmf,
enum page_entry_size pe_size);
void (*map_pages)(struct vm_fault *vmf,
pgoff_t start_pgoff, pgoff_t end_pgoff);
unsigned long (*pagesize)(struct vm_area_struct * area);
...
...
}vm_operations_struct 函数表总结
| 函数名 | 触发时机 | 作用和目的 |
|---|---|---|
open() | VMA 被加入地址空间时 | 增加对 VMA 资源的引用计数,确保资源不被过早释放。 |
close() | VMA 被从地址空间移除时 | 减少对 VMA 资源的引用计数,并在归零时释放资源。 |
fault() | 访问的物理页不在内存时(缺页中断) | 按需加载页面到内存,实现按需分页。 |
page_mkwrite() | 尝试对只读页面写入时 | 实现写时复制(Copy-on-Write),为进程创建可写副本。 |
access() | 内核函数无法直接访问页面时 | 提供一种备用方式来访问特殊的内存区域,如设备I/O空间。 |
关于fault函数指针
==fault 函数指针,就是处理缺页中断的具体实现。==
具体的 fault 函数不完全一样,它取决于 VMA 的类型。每个 VMA 都指向一个 vm_operations_struct 结构体
不同的 vm_operations_struct 实现,其 fault 函数也会有所不同。这是因为不同类型的内存区域在缺页时需要采取不同的行动。
- 文件映射:当 VMA 映射一个文件时,
vm_operations_struct会指向file_mmap_ops。它的fault函数会负责从磁盘文件读取数据到内存中。 - 匿名映射:当 VMA 是一个匿名映射(如堆、栈)时,它的
vm_operations_struct通常指向anon_vma_ops。它的fault函数会负责分配全新的、零初始化的物理页。 - 共享内存:如果 VMA 是共享内存,
fault函数会处理如何将页面共享给其他进程。 - 设备映射:如果 VMA 映射的是设备 I/O 空间,它的
fault函数会直接将页面映射到硬件地址,而不是从磁盘读取。
关于进程和线程的VMA共享问题
- 如果两个独立进程, 映射相同一个文件. 则会有两个不同的VMA. 因为进程的虚拟地址空间vm_mm不同. 但是由于是相同的一个文件, 所以映射的物理地址应该是相同的
- 如果针对两个线程. 除去栈VMA外, 其他的VMA应该是完全相同的
关系如下面两张图所示:
graph TD subgraph "进程 (多线程)" T1["task_struct <br/> (线程1)"] T2["task_struct <br/> (线程2)"] end subgraph 地址空间 MM["mm_struct <br/> (共享)"] end subgraph 内存区域 VM_CODE["vm_area_struct <br/> (代码段)<br/> 共享"] VM_DATA["vm_area_struct <br/> (数据段)<br/> 共享"] VM_HEAP["vm_area_struct <br/> (堆)<br/> 共享"] VM_STACK1["vm_area_struct <br/> (栈)<br/> 线程1独有"] VM_STACK2["vm_area_struct <br/> (栈)<br/> 线程2独有"] end T1 -- mm --> MM T2 -- mm --> MM MM -- mmap <br/> & <br/> mm_rb --> VM_CODE MM -- mmap <br/> & <br/> mm_rb --> VM_DATA MM -- mmap <br/> & <br/> mm_rb --> VM_HEAP MM -- mmap <br/> & <br/> mm_rb --> VM_STACK1 MM -- mmap <br/> & <br/> mm_rb --> VM_STACK2 VM_CODE -- vm_mm --> MM VM_DATA -- vm_mm --> MM VM_HEAP -- vm_mm --> MM VM_STACK1 -- vm_mm --> MM VM_STACK2 -- vm_mm --> MM style T1 fill:#e6f3ff,stroke:#007bff style T2 fill:#e6f3ff,stroke:#007bff style MM fill:#fff9c4,stroke:#fbc02d style VM_CODE fill:#c8e6c9,stroke:#388e3c style VM_DATA fill:#c8e6c9,stroke:#388e3c style VM_HEAP fill:#c8e6c9,stroke:#388e3c style VM_STACK1 fill:#f8bbd0,stroke:#d81b60 style VM_STACK2 fill:#f8bbd0,stroke:#d81b60
VMA在vm_mm中的组织方式(rbtree/list)
Linux 内核同时使用了这两种方法来管理进程的内存区域,以兼顾遍历和查找两种不同的需求
设计思路:mm_struct(内存描述符)中包含两个独立的成员:mmap 和 mm_rb。它们都指向同一批 vm_area_struct(内存区域描述符),但组织方式不同。
- mmap 域:这是一个指向双向链表的指针。所有的
vm_area_struct结构体都通过各自的vm_next字段按地址顺序连接起来。 优点:按顺序遍历所有内存区域非常快、非常简单。 - mm_rb 域:这是一个指向红黑树根节点的指针。所有的
vm_area_struct结构体都通过各自的vm_d字段连接到这棵树上。 优点:查找特定的内存区域非常快。红黑树是一种自平衡的二叉树,查找效率为 O(log n),比遍历链表(O(n))快得多。
为什么用两种方式来管理vma?
核心思想:这是一种**“空间换时间”**的优化策略。内核知道,它对内存区域的操作有两种主要类型:
- 遍历操作:例如,当内核需要检查进程的所有内存区域以处理核心转储(core dump)或
fork进程时,使用链表从头到尾遍历是最简单、最高效的方式。- 查找操作:当内核需要快速找到某个虚拟地址对应的内存区域时(比如在缺页中断时),使用红黑树进行高效搜索是更好的选择。
proc pmap中查看VMA
我们如何才能很好的观测VMA的使用情况呢?
最粗略统计 /proc/(pid)/status
VmRSS 代表 Resident Set Size,即常驻内存集大小。
- 含义:
VmRSS报告的是进程当前在物理内存(RAM)中占用的总内存大小。这包括了进程的代码、数据、堆、栈等,但不包括已经换出到磁盘的内存,也不包含仅作为虚拟地址空间存在而没有被实际使用的部分。 - 局限性:
VmRSS统计的是总和,它没有区分这部分内存是进程独占的(私有)还是与其他进程共享的。 因此,如果一个进程使用了大量的共享库,它的VmRSS可能会很高,但这部分内存实际上是与系统中的其他进程共享的,不能简单地认为它就是该进程的独立消耗。
一般统计pmap
主要优势在于它分解了内存使用。它会显示每个内存区域的地址、大小、权限以及它所映射的文件
pmap 最重要的功能之一就是它能清楚地区分私有内存和共享内存。这对于理解进程的真实内存消耗至关重要
最细致内存表 /proc/(pid)/smaps
/proc/[pid]/smaps 是一个伪文件,它为进程的每一个虚拟内存区域(VMA)提供了一份详细的报告。
你可以把它看作是 pmap 的底层数据源,但包含了更多用于精确内存统计的字段
每个 VMA 区域在 smaps 文件中都有一段详细的文本,包含了以下几个关键字段:
Size: 该 VMA 的总虚拟内存大小(通常与pmap中的 KBytes 列相同)。Rss(Resident Set Size): 该 VMA 实际占用的物理内存大小。这是该区域在 RAM 中驻留的页面总数。Pss(Proportional Set Size): 这是衡量内存消耗最客观的指标。它包含了该 VMA 的独占(私有)内存,并将共享内存部分按比例分配给所有共享它的进程。Shared_Clean: 与其他进程共享的、且没有被修改过的物理内存大小。Shared_Dirty: 与其他进程共享的、但被修改过的物理内存大小。Private_Clean: 进程独占的、且没有被修改过的物理内存大小。Private_Dirty: 进程独占的、且被修改过的物理内存大小。
要最准确地统计一个进程的内存消耗,最常用的方法是计算它的 Pss
cat /proc/1234/smaps | grep Pss | awk '{s+=$2} END {print s}'比较
| 指标 | 来源 | 特点 | 用途 |
|---|---|---|---|
| VmRSS | /proc/[pid]/status | 快速,但将共享内存重复计算。 | 快速概览,通常用于 ps、top 等工具。 |
| pmap | /proc/[pid]/smaps | 人类可读的摘要,能区分共享和私有。 | 快速分析内存映射,查看总私有/共享大小。 |
| smaps | /proc/[pid]/smaps | 最详细的逐 VMA 报告,包含 Pss。 | 深入分析内存使用,精确计算真实的内存消耗。 |
具体例子实践
参考/mem_watch_test
操作内存区域
如何根据虚拟地址找到所属的VMA?
find_vma() 根据虚拟地址找所属VMA
匹配过程可以概括为以下步骤:
- 缓存检查:首先,函数会检查
mm_struct中的mmap_cache。如果addr位于缓存的 VMA 区域内,函数会直接返回,这是最快的情况。 - 红黑树搜索:如果缓存未命中,函数会从红黑树的根节点开始:
- 它将
addr与当前 VMA 的地址范围 (vm_start到vm_end) 进行比较。 - 如果
addr大于或等于当前 VMA 的结束地址 (vm_end),说明addr肯定在右子树中,函数就沿右子节点继续搜索。 - 如果
addr小于当前 VMA 的结束地址 (vm_end),说明addr可能在当前 VMA 中,也可能在其左子树中。函数会沿左子节点继续搜索。
- 它将
- 匹配成功:当搜索到一个 VMA,并且
addr在其地址范围 (vm_start <= addr < vm_end) 内时,匹配成功,函数会返回这个 VMA。 此外, 还有find_vma_prep find_vma_intersection() 函数, 这里不详细看了
mmap和do_mmap()
我们平时调用mmap函数的时候, 具体内核是如何处理的?
- 首先mmap作为一个系统调用, 会触发一个软中断, 进入内核态,然后就会调用do_map函数进行内存申请
do_mmap()
- [?] 这个函数做什么的?
do_mmap()函数的主要任务是在进程的虚拟地址空间中创建一个新的内存区域(VMA),或者扩展一个已有的内存区域。
具体来说:
- 创建新的 VMA:这是最常见的情况。当程序需要一块新的内存时(比如通过
mmap()系统调用),do_mmap()就会创建一个新的vm_area_struct结构体,并将其添加到进程的地址空间中。 - 合并 VMA:这是一个重要的优化点。如果新创建的内存区域恰好与一个已存在的 VMA 相邻,并且它们拥有完全相同的权限和属性,内核会将这两个 VMA 合并成一个。这样做可以减少
vm_area_struct结构体的数量,从而简化内核的管理工作,提高内存查找和遍历的效率。
unsigned long do_mmap(struct file *file,
unsigned long addr,
unsigned long len,
unsigned long prot,
unsigned long flag,
unsigned long offset)file: 指向要映射的文件。addr: 是一个建议的起始地址。内核会从这个地址开始寻找一块足够大的空闲区域来创建 VMA。如果addr为NULL,内核会自己选择一个合适的地址。len: 要映射的内存区域的长度,以字节为单位。prot: 指定内存区域的访问权限(如读、写、执行)。这些权限标志在<asm/mman.h>头文件中定义,例如PROT_READ、PROT_WRITE、PROT_EXEC等。flag: 标志位,用于控制映射的行为,如MAP_SHARED(共享映射)、MAP_PRIVATE(私有映射)等。offset: 文件内的偏移量,表示从文件的哪个位置开始映射。
🤔**问答:**当我mmap一个文件的时候, 调用流程是什么样的?
sequenceDiagram participant U as 用户进程 participant C as C库 (glibc) participant K as 内核 (系统调用) participant M as 内核 (mm核心) U->>C: mmap(file, len, prot, flag, offset) activate C C->>K: syscall (mmap) deactivate C activate K K->>K: 检查参数 (fd, len, prot等) K->>M: sys_mmap() activate M M->>M: 寻找空闲地址空间 M->>M: 检查是否能与相邻VMA合并 alt 能合并 M->>M: 扩展已有的VMA else 不能合并 M->>M: 创建新的 vm_area_struct (VMA) end M->>M: 将VMA加入mm_struct的红黑树和链表 M-->>K: 返回新VMA的起始地址 deactivate M K-->>C: 返回起始地址 deactivate K C-->>U: 返回地址指针 (void* addr)
详细流程解释:
- 用户空间库函数调用 你首先在你的 C 代码中调用 mmap() 函数,传入文件描述符、大小、权限等参数。这个 mmap() 函数通常是由 C 库(如 glibc)提供的封装,它并不直接执行映射操作。
- 系统调用(System Call) C 库中的 mmap() 函数是一个 包装函数。它的主要作用是准备好参数,然后触发一个 系统调用。这个操作会从用户空间切换到内核空间,将控制权交给操作系统。
- 内核系统调用处理 在内核中,有一个专门的系统调用处理程序。它会接收到 mmap() 的请求,并根据系统调用号,将请求分发给内核中对应的函数,也就是 sys_mmap()(或其变体)。sys_mmap() 的主要职责是验证用户提供的参数(如权限、文件描述符等)是否合法。
- do_mmap() 核心实现 参数验证通过后,sys_mmap() 会调用真正的核心函数 do_mmap()。这是执行内存映射工作的“大脑”。do_mmap() 会执行以下关键操作:
寻找空闲地址:它会搜索进程的虚拟地址空间,找到一个足够大、符合要求的连续空闲区域来创建新的内存映射。
创建或合并 VMA:它会尝试为这个新的内存区域创建一个 vm_area_struct (VMA)。如果这个新区域正好与一个已存在的 VMA 相邻,并且它们的权限等属性都相同,do_mmap() 会进行优化,将两个 VMA 合并成一个。如果无法合并,它才会创建一个全新的 VMA。
关联文件:它将新创建的 VMA 与你提供的文件描述符所对应的文件结构体关联起来。
-
更新进程内存描述符 do_mmap() 最后一步是将新创建的 VMA 添加到进程的内存描述符 mm_struct 中。 它会将 VMA 添加到按地址排序的 mmap 链表中。 它还会将 VMA 插入到 mm_rb 红黑树中。
-
返回用户空间 所有工作完成后,do_mmap() 函数返回到 sys_mmap(),sys_mmap() 随后返回到用户空间。这个返回值就是内核选择的、新映射区域的起始虚拟地址。 从用户角度看,这个返回值就是 mmap() 函数的地址指针。
- [!] 注意: 此时,文件内容还未真正加载到物理内存中,但你已经可以使用这个指针来访问文件了。 当你第一次访问某个地址时,会触发缺页中断(page fault),内核会捕获这个中断,并调用 VMA 关联的 fault 方法,将文件内容加载到物理内存中。
常用 do_mmap 标志总结
| 标志 | 作用 | 典型使用场景 |
|---|---|---|
MAP_SHARED | 创建一个共享映射。对这块内存的修改会同步到文件,且对其他共享同一文件的进程可见。 | 进程间通信 (IPC);将文件内容直接作为内存进行读写,修改立即同步回文件。 |
MAP_PRIVATE | 创建一个私有映射。对这块内存的修改只对当前进程可见,且不会同步回文件。利用**写时复制(Copy-on-Write)**机制。 | 只读地访问文件内容,不希望修改影响文件;fork() 创建子进程时内存的默认共享方式。 |
MAP_ANONYMOUS | 创建一个匿名映射,不与任何文件关联。内存内容通常被内核初始化为零。 | malloc() 分配大块内存;实现进程的堆和栈;创建共享内存区域。 |
MAP_FIXED | 强制将映射创建在指定的 addr 地址。如果该地址不可用,mmap() 会失败。 | 嵌入式系统编程中,需要精确控制内存布局;与特定的硬件地址进行映射。 |
MAP_GROWSDOWN | 创建一个向下增长的内存区域。内核会自动扩展该区域,以满足对低地址的访问需求。 | 进程的栈。栈从高地址向低地址增长,这个标志确保了栈的自动扩展。 |
MAP_POPULATE | 告诉内核在创建映射时,就立即将文件内容预加载到物理内存中。 | 对延迟敏感的应用程序,希望避免首次访问时的缺页中断开销。 |
MAP_LOCKED | 锁定映射的页面,防止它们被换出到交换空间(swap)。 | 实时系统;高安全性应用,防止敏感数据被写入磁盘。 |
mmap与mmap2
-
[>] 一句话总结: 因为偏移字段长度的原因, 引入了mmap2, 表示页偏移量(偏移的页数)
-
[!] 详细说明:
-
历史背景:最早的
mmap()系统调用(由 POSIX 标准定义)使用**字节偏移量(byte offset)**作为最后一个参数。这限制了可以映射的最大文件大小和偏移量,因为off_t类型在当时可能只有 32 位。 -
mmap2()的出现:为了解决这个限制,内核引入了mmap2()这个新的系统调用。它将最后一个参数改为页面偏移量(page offset),而不是字节偏移量。- 页面偏移量:一个页面偏移量等于字节偏移量除以页面的大小(通常是 4KB)。这使得
mmap2()可以使用更小的off_t类型来表示更大的文件偏移量,从而支持映射更大的文件。
- 页面偏移量:一个页面偏移量等于字节偏移量除以页面的大小(通常是 4KB)。这使得
-
现在的实现:尽管 POSIX 标准仍然保留了原始的
mmap()函数,但现代的 Linux 内核已经不再直接实现它了。- C 库中的
mmap()函数会自动将字节偏移量转换为页面偏移量,然后调用内核的mmap2()系统调用来完成工作。
- C 库中的
-
[?] 最新的linux下又是怎样的? 在现代的 Linux 系统中,
mmap()和mmap2()的关系是这样的: -
在 32 位系统上:
glibc中的mmap()包装函数会把你的字节偏移量转换成页面偏移量,然后调用内核的mmap2()系统调用。 -
在 64 位系统上:由于 64 位系统可以直接处理非常大的字节偏移量,
mmap2()就不再需要了。glibc的mmap()函数会直接调用一个 64 位版本的mmap()系统调用,该版本能够处理 64 位偏移量,从而实现更大的文件映射。
mummap 和 do_mummap
作用: 删除地址区间
int munmap (void *start, size_t length)
页表
虚拟地址和物理地址之间怎么转换的?
这个转换是通过查询页表来完成的。页表就像一个巨大的索引,它告诉处理器某个虚拟地址对应哪一个物理地址。
多级页表机制
如果只使用1级页表, 则需要巨大的页表空间来容纳所有的虚拟地址
1,048,576 个页表项×4 字节/项=4,194,304 字节≈4MB 即使进程只使用很少一部分内存(比如 1MB),页表本身也必须完整存在,这会造成巨大的内存浪费
多级页表的结构图
页表查找还是很慢, 还有什么加速方法?
优化方法1:TLB 硬件地址缓存
用TLB缓存最近使用过的VIR_ADDR—PHY_ADDR的映射
工作原理
graph TB A["处理器需要访问一个vir addr"] B{"检查TLB"} C["缓存命中"] D["缓存未命中"] E["访问物理地址"] A-->B B-- 是 -->C C-->E B-- 否 -->D D-->f["从内存中查询页表"] f-->g["获取页表项PTE"] g-->h["从PTE中多级查询到物理地址PA"] h-->i["将VA--PA 这组映射关系 记录到TLB中"] i-->j["访问物理内存"]
优化方法2: cow写时复制 共享页表
fork的时候, 子进程 并不是立即复制 父进程页表; 而是共享一份页表, 只有当父进程或者子进程试图修改页表项的时候, 才会创建一个副本